Что такое лазерный трекер? Принцип работы.
В этой статье мы кратко опишем технологии и принципы работы, которые используются в лазерных трекерах Leica серий AT930/AT960. Вы увидите, как работает трекер, что происходит, во время выполнения измерений и как они соответствуют спецификации. В дополнение, статья содержит обзор некоторых компонентов системы.
1. Принцип 3D-измерений.
![]()
Принцип 3D измерений лазерным трекером это просто – трекер измеряет всего три параметра – два угла и расстояние:
Параметры 3D-измерений трекером |
|---|
| Горизонтальный угол – Hz |
| Вертикальный угол – V |
| Расстояние – D |
Эти три сферические координаты (Hz/V/D) трансформируются в прямоугольные координаты (X/Y/Z) Углы измеряются с точностью угловых энкодеров, датчиков встроенных в трекер. Расстояние до цели определяется с помощью технологии абсолютного интерферометра (AIFM). AIFM совмещает в себе интерферометр (IFM) для измерений относительных расстояний с высокой скоростью в динамике и абсолютный дальномер (ADM) для определения абсолютных расстояний. Две системы работают одновременно, что позволяет трекеру зафиксировать луч на движущемся отражателе и отслеживать его перемещения с высокой точностью и высокой частотой замеров, до 1000 Гц (1000 измерений в секунду).
Используются различные типы отражателей:

Таким образом, по аналогии с измерениями любыми контактными КИМ, принцип измерений и работы с лазерным трекером следующий: прибор подключается к компьютеру, на котором установлено метрологическое программное обеспечение для сбора и анализа данных (напр. PolyWorks). (Без компьютера подобными устройствами обычно не работают, т.к. сбор самих данных измерений осуществляется непосредственно в программном обеспечении.) Т.к. трекер следит за отражателем и подключен к компьютеру, управляющая программа “знает” положение центра отражателя в системе координат трекера (или любой другой). Далее с помощью отражателя, посредством контактных измерений (отражатель помещается прямо на измеряемую поверхность) набираются точки на изделии, по которым программа строит геометрические элементы, описывающие измеряемую деталь, например цилиндры (отверстия), плоскости (грани, фланцы), конусы и т.п. Далее уже эти элементы оцениваются в программе на предмет размеров, допусков и т.п. (габаритный размер изделия между плоскостями, межосевое расстояние, сооность, параллельность и т.п). Если мы используем сканер для трекера, то в программе формируется облако точек, и остальные манипуляции проходят уже с ним. При наличии 3Д-модели (CAD), программа позволяет совместить данные измерений с этой моделью и тогда номинальные размеры изделия берутся из этой модели автоматически.
2. Принцип 6D-измерений.
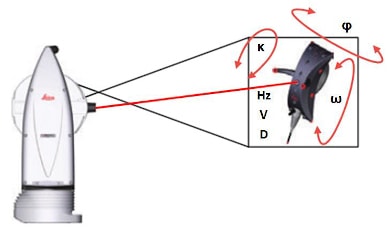
Трекеры серии AT960 могут выполнять 6D-измерения с помощью встроенной измерительной камеры с оптическим варио-зумом. Благодаря этому у трекера есть возможность проводить измерения на Т-устройства (напр. T-Probe). Т-устройства оборудованы отражателем-призмой и набором инфракрасных светодиодов (IR LED). По принципу 3D-измерений трекер определяет положение призмы, в то время как измерительная камера производит замеры положения светодиодов, которые используются для вычисления углов поворота Т-устройства в поле зрения камеры. Вместе с параметрами положения Т-устройства (Hz/V/D), которые определяет трекер и углами поворота Т-устройства (ω, φ, κ), которые определяет измерительная камера в целом вся система AT960 производит замер 6-ти параметров, то есть производит 6D (6DoF) измерения:
Параметры замеряемые камерой |
Параметры замеряемые трекером |
|---|---|
| Вращение относительно оси X – Omega ω | Горизонтальный угол – Hz |
| Вращение относительно оси Y – Phi φ | Вертикальный угол – V |
| Вращение относительно оси Z – Kappa κ | Расстояние – D |
Т-устройства, которые работают с трекером AT960:



Технологические особенности
Угловые энкодеры
Система измерений углов состоит из кодированного стеклянного круга и четырех угловых датчиков, благодаря чему производится четырехкратное считывание данных. Четыре отдельных датчика уменьшают систематические и периодические ошибки возникающие при измерениях углов, следовательно общая точность измерений возрастает.
Абсолютный интерферометр (AIFM)
Для лучшего понимания принципа работы абсолютного интерферометра сначала мы рассмотрим по отдельности два компонента его составляющих: абсолютный дальномер (ADM) и интерферометр (IFM). Оба решения имеют свои сильные и слабые стороны.
Интерферометр (IFM)
Интерферометр позволяет определять относительные расстояния (т.е. расстояние между двумя точками) с субмикронной точностью. Лазерный луч направляется трекером на отражатель и возвращается, при этом оба луча (прямой и обратный) оцениваются трекером одновременно. Во время движения отражателя возвращаемый луч тоже движется и волны обоих лучей начинают пересекать друг друга, образуя волну суперпозиции.
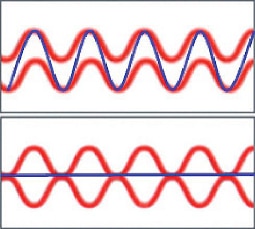
Каждое смещение луча равное наложению волн в суперпозицию равно изменению расстояния в ½ длины волны лазера. Отсюда и исходит термин интерферометра «считающий»: если известно направление движения и количество раз возникновения пиков суперпозиций, то оно умножается на ½ длины волны лазерного луча и в результате получается точное приращение расстояния. Частота обновления приращения зависит только от скорости перемещения отражателя. Все это делает интерферометр идеальным инструментов для выполнения измерений в динамике. Потому что совершенно не важно, с какой скоростью движется отражатель, любые его перемещения фиксируются системой на субмикронном уровне.
Интерферометр может определять относительные расстояния с субмикронной точностью, однако он не может определять абсолютные расстояния, т.е. не имея известной начальной точки!
Абсолютный дальномер (ADM)
Абсолютный дальномер определяет абсолютные расстояния с высокой точностью. Абсолютному дальномеру свойственно такое понятие, как время интеграции. Это время необходимое на выполнение операций по вычислению позиции отражателя. Модуль ADM использует модулированный и поляризованный инфракрасный лазерный луч. Необходимо знать три основных параметра для определения расстояния:
- Длина волны источника света
- Скорость света
- Частота модуляции поляризованного света
Частота модуляции ключевой параметр ADM. Отраженная волна анализируется некоторый период времени для определения точки минимума. Это качественное измерение волны является скачкообразным типом измерения, которое «скачет» вперед и назад по точке минимума волны, чтобы рассчитать измеренное среднее значение.
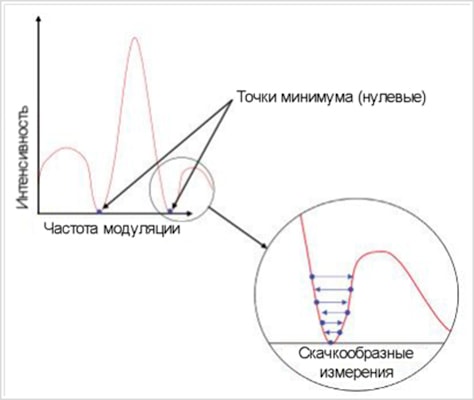
Отражатель должен оставаться неподвижным во время этих скачкообразных измерений. Если отражатель движется в этот момент, то форма волны меняется, и точка минимума смещается. Следовательно, абсолютный дальномер не может использоваться для определения подвижных целей.
Абсолютный интерферометр (AIFM)
Абсолютный интерферометр (AIFM) это модуль, который объединяет в себе интерферометр (IFM), для динамических измерений и абсолютный дальномер (ADM), для измерений абсолютных расстояний. Обе системы производят измерения на отражатель одновременно, что позволяет динамически отслеживать движущуюся цель с высочайшей точностью. Как только трекер захватывает отражатель, интерферометр (IFM) начинает производить замеры относительного смещения. Даже если отражатель перемещается с максимальной скоростью и ускорением, интерферометр позволяет определять это смещение с субмикронной точностью и передавать эти данные в модуль дальномера (ADM). Дальномер анализирует волну, как описано выше, и использует информацию от интерферометра (IFM), для расчета всего смещения. Как только вычисляется точка минимума, абсолютное расстояние передается назад интерферометру (IFM). Этот процесс превращает интерферометр из относительного инструмента в интерферометр с известным базовым расстоянием, более известный, как абсолютный интерферометр – AIFM.
Привязка к отвесной линии («Orient-to-Gravity», OTG) / Датчик угла наклона (инклинометр)
Двухосевой инклинометр расположен внутри корпуса трекера. Он может работать в различных режимах, в зависимости от устойчивости поверхности, на которой установлен трекер.
- Привязка к отвесной линии
- Мониторинг
- Инклинометр выключен
В идеале, когда инструмент привязан к отвесной линии, ось его вращения параллельна этой линии. Однако в реальных условиях это невозможно. Во время процедуры привязки к отвесной линии система производит замер отклонения (двух углов) оси вращения инструмента от отвесной линии. В случае работы трекера в режиме привязки к отвесной линии каждое измерение трекера корректируется этими двумя углами.
Помимо этого, инклинометр может использоваться для мониторинга положения оси вращения трекера.
 Hexagon MI
Hexagon MI